1.2 C-V2X概述
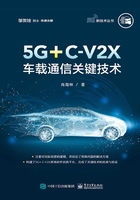
事实上,车载通信技术(Vehicle-to-Everything,V2X)是构建车联网、实现ITS的关键,V2X决定着系统的整体性能[4]。V2X作为新一代通信技术,实现V(车辆)与任何信息交互的对象X(主要包含人、车、道路基础设施、云平台或网络等)的协调感知和互联互通。V2X通信通过车与车之间(Vehicle-to-Vehicle,V2V)、车与路之间(Vehicle-to-Infrastructure,V2I)、车与人之间(Vehicle-to-Pedestrian,V2P)、车与网络或云平台之间(Vehicle-to-Network,V2N)构建移动互联的环境感知和信息交互体系,从而构建出满足智能交通感知和互联特征的数据环境,实现ITS系统的人、机、物广泛信息互联互通与协同控制[5~7]。V2X通信场景如图1-2所示。

图1-2 V2X通信场景
因此,V2X通信不仅可以促进ITS的发展和应用,还有利于创新智慧交通的新模式,对进一步减少交通拥堵、提高交通安全和交通效率及实现绿色交通具有显著意义[8]。与V2X通信相关的应用,具有高可靠性与低时延等特点。目前,支持V2X通信的主流技术解决方案包括基于IEEE 802.11p协议标准的专用短程通信(Dedicated Short Range Communication,DSRC)技术和基于蜂窝网的V2X(Cellular Vehicle-to-Everything,C-V2X)技术(包括LTE-V2X和5G+NR-V2X)[6~11]。其中,3GPP的C-V2X标准化工作主要分为3个阶段:第1阶段是基于长期演进(Long Term Evolution,LTE)技术满足LTE-V2X的基本业务需求,对应LTE Rel-14版本;第2阶段是基于LTE技术满足部分5G+V2X增强业务需求(LTE-eV2X),对应LTE Rel-15版本;第3阶段是基于5G新空口(5G+NR)技术实现全部或大部分5G V2X增强业务需求,对应5G+NR Rel-16和Rel-17版本。表1-1给出了DSRC与C-V2X技术的对比差异[8~11]。
表1-1 DSRC与C-V2X技术的对比差异

以美国为主导的DSRC技术被认为是V2X车载通信的基础标准,美国联邦通信委员会给予分配的物理层有效通信带宽总共为75MHz,其中与安全控制信道相关的带宽仅有10MHz。随着车辆保有量的快速增长,有限的频谱资源无法满足车载通信网络接入的高数据流量需求,并给车载安全通信带来挑战。研究结果表明,DSRC技术在同时存在多个车载通信节点的情况下性能较差。另外,IEEE 802.11p标准是在IEEE 802.11a标准的基础上进行开发扩展的,其MAC层采用了载波监听碰撞避免带有冲突避免的载波侦听多路访问(Carrier Sense Multiple Access with Collision Avoid,CSMA/CA)机制。然而,已有文献表明基于DSRC机制在车载通信节点较多时存在较大的包碰撞丢失率与接入时延,同时面临着可扩展性差、不可预测的广播风暴与隐蔽终端问题[6~9]。特别是在车联网建设初期,车载路边基础设施部署较为缺乏、车载高速移动导致车载通信网络的拓扑结构变化较快等特点使得V2X通信变化为间隙连通性,通信发生中断的概率较大,不能很好地满足V2X通信高可靠性与有效性的需求。事实上,以我国为主导的C-V2X通信技术,利用现有基站通信信号广泛覆盖的特点,能很好地克服IEEE 802.11p标准通信模式下通信链路连通性不足的缺陷,然而传统的基于蜂窝网的V2X通信模式下,通信信号必须通过蜂窝基站的中继转发,如此加重了蜂窝基站的负担,并在一定程度上增加了V2X通信的时延。