1.1 环境感知的定义
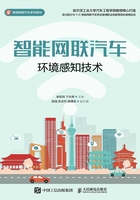
环境感知、智能决策和控制执行是智能网联汽车的关键技术,图1-2所示为智能网联汽车的“三横两纵”技术架构。可以看出,环境感知是智能网联汽车其他技术的数据基础,为智能决策和控制执行提供依据,是智能网联汽车实施自动驾驶的第一步。

图1-2 智能网联汽车的“三横两纵”技术架构
环境感知通过安装在智能网联汽车上的智能传感器或V2X通信技术获取道路、车辆、行人、交通标志和交通信号灯等信息,并将这些信息传输给车载控制中心,应用于先进驾驶辅助系统(Advanced Driver Assistance Systems,ADAS)或自动驾驶系统,保障智能网联汽车安全、准确到达目的地。智能网联汽车的环境感知如图1-3所示。

图1-3 智能网联汽车的环境感知
智能传感器主要是指视觉传感器、超声波雷达、毫米波雷达和激光雷达。视觉传感器是通过摄像头采集外部信息并根据算法进行图像识别;超声波雷达是通过发射和接收超声波,分析折返时间测算距离;毫米波雷达是通过发射和接收毫米波,分析折返时间测算距离;激光雷达是通过发射和接收激光,分析折返时间测算距离。
视觉传感器、超声波雷达和毫米波雷达采集的信息主要用于先进驾驶辅助系统,如前向碰撞预警系统、车道偏离预警系统、盲区监测系统、驾驶员疲劳预警系统、车道保持辅助系统、自动制动辅助系统、自适应巡航控制系统和自动泊车辅助系统等;激光雷达采集的信息主要用于自动驾驶的精准定位和可行空间检测。基于车载智能传感器的环境感知如图1-4所示,它是目前智能网联汽车环境感知的主要解决方案。

图1-4 基于车载智能传感器的环境感知
V2X通信技术主要包括V2V、V2I和V2P,它们采集的信息既可以用于ADAS,也可以用于自动驾驶系统,特别是车路协同控制,具有较大的优势。V2X通信技术获取的信息范围更为广阔,可以提供360°视觉感知,不受天气和道路环境的影响,可以给驾驶员或自动驾驶系统提供更多的信息,保障车辆的安全行驶。基于V2X通信技术的环境感知如图1-5所示。
环境感知相当于智能网联汽车的“眼睛和耳朵”,它的性能将决定智能网联汽车能否适应复杂多变的交通环境。自动驾驶程度越高,对环境感知要求越高。无人驾驶汽车对环境感知的要求最高,其次是自动驾驶汽车、智能网联汽车和智能汽车。

图1-5 基于V2X通信技术的环境感知