3.3 起重机货物摆动误差分析
起重机具有变幅、回转和起升运动三种基本工作状态,为了提高工作效率,同时进行变幅、回转和起升运动,这使货物的运动情况更加复杂——悬挂点移动的变摆长空间摆运动,其摆动模型是时变的非线性二阶微分方程。为了实现货物位置控制和消摆控制,通常的做法是将模型线性化,简化成单摆运动,然后提出消摆控制策略。在这一线性化过程中,存在着简化误差,忽略了真实系统的动力学特性,使高精度轨迹跟踪控制策略难以实现。本节从理论上对回转塔式起重机动力学模型线性化过程中存在的误差进行了定量分析,定量描述了动力学参数对货物摆动的最大幅值和摆动频率的影响规律,定量描述了忽略起升运动引起的货物摆动误差,从而更精确地描述了在起重机同时做变幅、回转和起升运动的工况下系统动力学特性。
3.3.1 模型线性化引起的货物摆动误差分析
线性化模型是在平衡状态θe=0° 和ϕe=0° 附近对系统施加小扰动,忽略高次项,保留一次项求得。在这一线性化过程中忽略了部分科氏力,使状态变量之间解耦,非线性模型得以线性化。
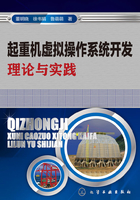
起重机在同时做变幅、回转和起升运动的工况下,货物摆动误差曲线如图3.12所示。系统仿真参数同图3.8。

图3.12 根据非线性模型与线性化模型计算货物的摆动角度之差

图3.13 根据非线性模型计算的货物摆角
从图3.12可以看出:非线性模型计算的货物摆角与线性化模型计算的摆角之差小于10-2的数量级,因此线性化误差可以忽略不计。
图3.12仿真结果是在起重机的变幅运动和回转运动时间很短的情况下得到的,若起重机做长距离的变幅运动和大幅度的回转运动,货物摆动的情况如图3.13所示。
系统参数:货物质量m=1kg;采样频率为0.005s;小车质量M=1.5kg,小车运行的最大加速度amax=1m·s-2,额定速度vmax=0.3m·s-1,小车运动等效阻尼系数bρ=0.1N·s·m-1,参考命令是加速运行0.3s,匀速运行9.7s;起吊臂的转动惯量Jm=5.5kg·m2,回转额定速度度 ,参考命令是加速运行0.3s,匀速运行9.7s;起升机构的额定提升速度
,参考命令是加速运行0.3s,匀速运行9.7s;起升机构的额定提升速度 ,起升钢丝绳的长度1.5m;实现起重机点到点的位置控制,边值约束条件为
,起升钢丝绳的长度1.5m;实现起重机点到点的位置控制,边值约束条件为

式中,tf表示起重机运行时间。上式确定了起重机的起止状态,即起止位置、速度和加速度。
从图3.13可以看出:随着变幅运动和回转运动的大幅度进行,货物摆动中心线发生倾斜。起升运动不影响货物摆动中心线的位置,但对自由摆动延续时间的长短有着决定性的作用。而变幅运动和回转运动使货物摆动中心线发生倾斜,其倾斜量用平衡状态值θe和ϕe表示。
 (3.26)
(3.26)
 (3.27)
(3.27)
式(3.26)和式(3.27)描述了动力学参数对货物摆动中心线的影响规律,变幅运动和回转运动使货物摆动中心线发生倾斜,相当于货物在倾斜的重力场内做空间摆运动,摆动中心线倾斜量就是平衡状态值。当运动学参数超过一定值时,不再满足模型线性化的前提条件,应求解新的平衡状态,在新的平衡状态下对非线性模型进行线性化处理。
3.3.2 惯性力引起的货物摆动最大幅值估计
从线性化模型可以看出,摆角θ和ϕ主要由启动、制动惯性力引起,即大的启动、制动加速度产生大的摆角,回转离心力和科氏力使摆动中心线倾斜。若以最短的时间启动、制动,线性化模型中有最大的输入,将产生最大的摆角和摆速,据此估算货物摆动的最大摆角和摆速。将式(3.22)和式(3.23)简化为分别由变幅运动惯性力和回转运动惯性力作用下的摆动模型。
 (3.28)
(3.28)
 (3.29)
(3.29)
方程(3.28)的通解为
 (3.30)
(3.30)
式中,c1和c2是待定系数;ωn为货物摆动固有频率, 。假设系统初始状态为0,则式(3.30)的解为
。假设系统初始状态为0,则式(3.30)的解为
 (3.31)
(3.31)
 (3.32)
(3.32)
将正、余弦函数用泰勒级数展开,且忽略高次项,解进一步简化为
 (3.33)
(3.33)
 (3.34)
(3.34)
起重机以最短时间启动,在完成启动瞬间货物摆动角度和角速度: ,
, ,即变幅运动引起最大摆速
,即变幅运动引起最大摆速 。同理,回转运动引起货物最大摆速为
。同理,回转运动引起货物最大摆速为 。忽略空气阻力和风货物等外界干扰的影响,根据能量守恒定律,估计最大摆角。
。忽略空气阻力和风货物等外界干扰的影响,根据能量守恒定律,估计最大摆角。
 (3.35)
(3.35)
 (3.36)
(3.36)
通过以上推导得出:若摆长和变幅速度满足l<(18νmax)2/(π2g),摆角θ大于10° ,若摆长和回转速度满足 ,摆角ϕ 大于10° ,此时不满足线性化模型的假设条件,即线性化模型存在着较大的误差。式(3.35)和式(3.36)揭示了动力学参数对最大摆角的影响规律。
,摆角ϕ 大于10° ,此时不满足线性化模型的假设条件,即线性化模型存在着较大的误差。式(3.35)和式(3.36)揭示了动力学参数对最大摆角的影响规律。
3.3.3 忽略起升运动引起的货物摆动误差分析
许多文献认为起重机起升运动对货物摆动影响不大,在不考虑起升运动的情况下进行消摆控制,从而影响控制精度。起升运动使系统成为弱阻尼二阶振荡系统,货物摆动的角度和角速度是幅值和频率缓慢变化的周期函数,下面讨论起升运动对货物摆动幅值和频率的影响规律。
eθ方向摆动的固有频率为
 (3.37)
(3.37)
阻尼系数为
 (3.38)
(3.38)
eϕ方向摆动固有频率为
 (3.39)
(3.39)
阻尼系数为
 (3.40)
(3.40)
由于 与g相比很小,ωn1与ωn2近似为
与g相比很小,ωn1与ωn2近似为
(3.41)
货物摆动频率为
 (3.42)
(3.42)
在一个摆动周期内摆动幅值衰减或增加
 (3.43)
(3.43)
提升重物时,阻尼系数是负值,为增幅摆动,摆动周期越来越小;当重物下降时,阻尼系数是正值,为减幅摆动,摆动周期越来越大,即起升运动使货物摆动的幅值和频率发生变化。图3.14表示提升重物时,考虑与忽略提升运动的情况下,货物摆动角度响应曲线。

图3.14 忽略与考虑提升运动时货物的摆动情况
系统参数:货物质量m=1kg;采样频率为0.005s;小车质量M=1.5kg,小车运行的最大加速度amax=1m·s-2,额定速度vmax=0.3m·s-1,小车运动等效阻尼系数bρ=0.1N·s·m-1,参考命令是加速运行0.3s,匀速运行9.7s;起重臂的转动
惯量Jm=5.5kg·m2,回转额定速度 ,参考命令是加速运行0.3s,匀速运行9.7s;起升机构的额定提升速度
,参考命令是加速运行0.3s,匀速运行9.7s;起升机构的额定提升速度 ,起升钢丝绳的长度由4.5m提升到0.5m;实现起重机点到点的位置控制,边值约束条件为
,起升钢丝绳的长度由4.5m提升到0.5m;实现起重机点到点的位置控制,边值约束条件为

式中,tf表示起重机运行时间。上式确定了起重机的起止状态,即起止位置、速度和加速度。
从图3.14可以看出:随着重物的上升,摆动周期越来越小,摆动幅值越来越大,摆动中心线发生倾斜,忽略提升运动,货物摆动周期不变。在运输货物的过程中,大幅度提升货物时,若忽略提升运动,将产生大的误差,应该考虑提升运动的影响。重物下降时,货物摆动角度响应曲线如图3.15所示,情况恰好相反。

图3.15 忽略与考虑下降运动时货物的摆动情况