上QQ阅读APP看书,第一时间看更新
1.2 KUKA工业机器人
知识目标
了解KUKA六轴工业机器人的组成及各组成的功能。
了解KUKA六轴工业机器人示教器的组成。
技能目标
能正确描述KUKA六轴工业机器人本体、控制柜以及示教器的组成和功能。
相关知识
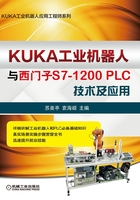
KUKA工业机器人由工业机器人本体、手持式编程器和工业机器人控制柜等组成,具体组成如图1-12所示。

图1-12 KUKA工业机器人组成
1—工业机器人本体 2—手持式编程器 3—连接线缆/Smart PAD 4—工业机器人控制柜 5—连接线缆/数据线 6—连接线缆/电动机导线 7—设备连接线缆
1.2.1 KUKA工业机器人本体
工业机器人本体俗称为机械手,是工业机器人机械系统主体。工业机器人本体组成如图1-13所示。
另外,工业机器人由六个活动的、相互连接在一起的关节组成,关节也可称为轴,分别是A1、A2、A3、A4、A5、A6,如图1-14所示。

图1-13 KUKA工业机器人本体组成
1—手腕 2—手臂 3—连接臂 4—旋转立柱 5—电气接口 6—基座

图1-14 轴名称
1.2.2 KUKA工业机器人控制柜
本实训平台采用的是KR C4紧凑型控制柜,主要由控制部件(控制箱)和电力部件(驱动装置箱)组成,具体如图1-15所示。

图1-15 KR C4紧凑型控制柜
1—控制部件(控制箱) 2—电力部件(驱动装置箱)
1.2.3 手持式编程器
手持式编程器简称KCP或示教器,全称Smart PAD。它具有工业机器人操作和编程所需要的各种操作和显示功能。它正面配备一个触摸屏smartHMI,可用手指或触控笔进行操作。背面配备有确认开关、启动键和USB接口等。示教器如图1-16所示。正面和背面的说明具体如表1-1、表1-2所示。

图1-16 示教器正面和反面
表1-1 示教器正面说明

表1-2 示教器背面说明
